作者: 时间:2021-05-28
一、光束位置测量
激光束的独特之处在于良好的直线度保持,在各项均匀介质中它能从点A到点B以完美的直线状态在空间中传播。基于此功能,可以使用许多直线度和定位检测设备。但是,尽管从点A到点B传播途径是一条完美的直线,但是该状态仅存在于理想状态下,随着外界因素的影响,如已知的时间和环境因素,或内部因素的影响,如光束质量因子和发散角等。这些都会导致在大多数情况下,直线运动的保持仅占整体传播途径的一小部分,因此在长距离路径传播中,该直线运动状态的保持可能会出现问题。
以色列DUMA为用户提供光束位置定位系统,并通过整合特殊的高稳定性激光器,以尽可能的减少漂移量。基本技术基础包括:用于对准检测的四象限传感器,用于工程测量的横向效应传感器(微米级偏差响应),用于激光束定位和角度偏差检测的双传感器对准检测系统(AlignMeter),除此之外,特殊设计的SpotOn LA可以提供大范围(100mm)的运动位置监控。对于特殊应用需求,SoptOn系列部分产品支持多光束测量,且可接受连续激光或脉冲激光的定位和机械系统对准需求。
以上产品均由SpotOn系列产品线所提供,其中属于激光准直仪产品分类的的激光束指向稳定系统可以同时实现激光位置定位以及角度监控的功能,Alignmeter激光指向稳定系统对于机械系统的对准和铰接臂的调试起到至关重要的作用。与上述产品相匹配的对准激光器均以“LaserOn”品牌名称提供。

二、四象限位敏探测器
在某些应用中,有必要将激光束对准目标并长时间保持高精度对准。为了确保长时间保持激光束在机械系统对准状态,有源反馈环路通过将光束调零到目标中心来保持对准。而用于此应用的最佳检测器是四象限检测器,因为四象限检测器的中心不会随时间或温度变化。设备调零的操作由计算机控制,该计算机处理来自检测器的信号并调整指向镜以使光束重新居中。四象限检测器的最重要特征之一是检测器之间的间隙–尽管可以提供更好的间隙,但通常的间隙距离是10微米或30微米。
四象限探测器由四个相等的光探测器封装为一个,因探测器硅片上存在一个十字交叉的间隙,而探测器的中心是十字形分离产生的交点。以探测器为中心的激光束将从每个部分产生相等的电流。将束流的运动转化为每一段上不同的电流,通过对这些数据的处理,可以计算出束流中心的波动。计算的波动以相对于光斑尺寸的移动百分比表示,因此了解光斑的大小有助于转换为工程单位,SpotOn系列产品提供的软件足以进行这些光束定位的计算。
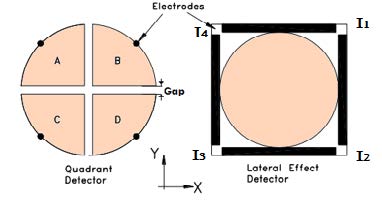
如下图所示,说明了四象限和侧向效应探测器的几何形状。
在四象限检测器中,四个段用字母A,B,C和D表示。
三、PSD(Position Sensitive Detector) –位置敏感探测器
该系列检测器将显示入射激光束的质心位置,并将在工业,光学,对准和常规激光质量保证领域找到广泛的应用领域。对于工程位置感测,广泛使用了三种类型的检测器:双轴横向效应检测器和像CCD和CMOS这样的镶嵌式检测器。
横向效应探测器的工作方式与四象限探测器类似,其中信息由四个电极(每个轴两个)传递,并附着到敏感表面的背面。在这种情况下,这四个电流是通过光吸收产生的,并用适当的算法进行进一步处理以给出x和y位置。在镶嵌系统中,光束位置是通过测量传递到检测器表面上每个像素的能量来确定的。有关位置感应设备的详细信息,请查阅Duma的SpotOn系列详细规格书。
四、横向效应位敏传感器
双轴横向效应检测器具有连接到检测器的四个电极,并且通过适当的算法处理由光吸收产生的四个电流,以给出X和Y位置。连接电极,使相对的电极对产生光电流,可以通过算法对其进行处理,以在X和Y方向上给出唯一的位移值。
通常算法是使用固定的电子电路执行的,并且位置精确到百分之几。大多数横向效应二极管在中心区域的线性度在0.5%以内(有效区域的25%),在3%的线性度范围内达到75%,在外围的5%。
但是,SpotOn系列具有软件控制算法,该算法使用存储在存储器中的校准校正来线性化检测器响应并在整个传感区域内获得精确校准。
这种线性化功能意味着,双轴横向效应检测器可用于测量光束在其整个表面上的位置,而成本却只是具有类似线性度的类似检测器的一小部分。因为每个横向效应检测器都有一套独特的线性校正因子,所以每个系统都是由检测头,插入式电脑卡和线性化软件组成的匹配和序列化组。如果探测头与不同于所提供的电脑卡或软件一起使用,系统将不再校准。
X=I1+I2-I3+I4I1+I2+I3+I4
Y=I1+I2-I3+I4I1+I2+I3+I4
五、CCD位敏传感器
CCD传感器是将光学图像转换为电子信号的设备。在定位应用中,使用特殊的校准CCD设备将激光能量转换为CCD传感器检测到的变化。
CCD图像传感器是一种电子设备,被构建为被视为像素的小型检测元件的二维阵列。如今,传感器的像素大小从大约2微米到10微米以上不等,每个传感器的像素数可能超过2000万像素。当光照射到芯片时,每个光电传感器会将其保持为与光强度成比例的小电荷。芯片读取这些变化后,将其转换为电压,一次转换一个像素。
摄像机中的其他电路将电压转换为数字信息。对于定位应用,CCD检测器必须非常均匀,并将入射光水平线性转换为其局部强度。使用CCD检测器的普通摄像机则不是这种情况。
其他电子设备将每个像素上的电压信息转换为数字信息,并将该信息流传输到USB端口。一种软件算法将数据转换为定位信息,以通过特殊软件进行显示。CCD检测器在脉冲应用中具有明显的优势
与其他探测器相比。位置分辨率通常受传感器像素大小的限制。这两种技术在使用过程中都没有明显的优势,因此应根据个案研究进行评估。
激光位置探测器被用作Duma Optronics提供的各种仪器的基础,例如Alignmeter 激光指向稳定系统,AngleMeter角度监控设备,电子自动准直仪和其他应用的仪器设备。


