作者: 时间:2024-01-31
关于如何为TDI设置 Zaber Nucleus显微镜,我们选择了Tucsen Dyhana 9KTDI制冷型sCMOS相机,最大触发速率为510kHz。Dyhana 9KTDI属于一类新型sCMOS TDI相机,能够实现极高的线速,总读取噪声损失为7e-,总输出为256次读取。这与配备Zaber载物台 X-ADR130B100B的zaber Nucleus显微镜Nucleus™ MVR自动倒置荧光显微镜配对。Zaber线性电机平台使用1 nm分辨率的光学编码器,使其具有极其精确和可重复的定位和编码器触发功能,并实现出色的速度稳定性。

图1:Dyhana 9KTDI sCMOS相机和zaber Nucleus显微镜MVR系列
步骤1:相机连接
在zaber厂家的测试中,使用了以下硬件和软件:
-细胞核MVR电动倒置荧光显微镜
-Zaber X-ADR 130显微镜载物台
-Tucsen Dyhana 9KTDI sCMOS相机
-Zaber D12 IO电缆(包含在X-ADR载物台中)
-Sparkfun BOB-12009逻辑电平转换器
-DfRobot DFR0140 5V / 3.3V USB电源
-Tucsen HR10A-7P-4P触发电缆
-卡亚科莫多二世图像采集卡
-Tucsen M72x1 F接口转接环
-Zaber MTC90x-F F卡口摄像管(可根据要求提供)
-Zaber L auncher载物台配置和控制软件
-KAYA VisionPoint图像采集卡控制和配置软件
-Tucsen Sample Pro相机控制和配置软件
Dyhana 9KTDI摄像头IO在3.3V逻辑电平下工作,而Zaber IO在5V下工作。本例中使用了BOB-12009,一种基本的、廉价的逻辑电平转换器(图2),为信号提供低延迟电压转换。这不是工业级组件,不建议在生产系统或关键应用中使用。为避免损坏相机,在打开电源之前,应注意确保5V和3V3引脚连接到正确的引脚。
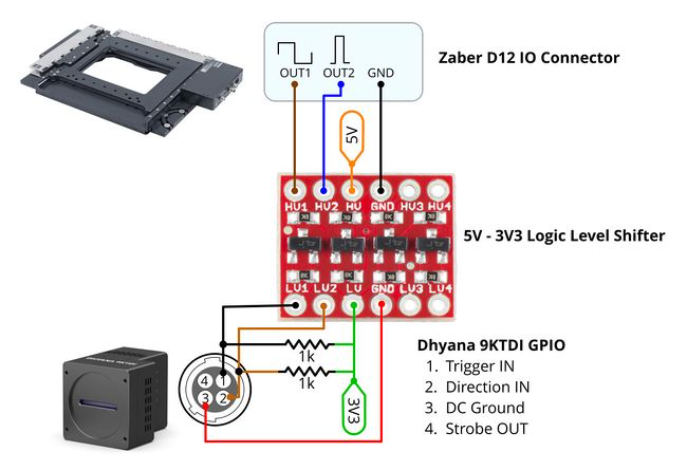
图2:将BOB-12009逻辑电平转换器连接到载物台和相机的原理图
步骤二:触发率计算:
如何为TDI相机设置Zaber Nucleus显微镜,将相机的触发与样品的移动同步对于捕获清晰、无失真的图像至关重要。可以使用以下公式确定触发速率,该公式将给出以kHz为单位的触发速率:ƒ=(V•M)/p,其中V是以mm/s为单位的级速度,M是有效的系统放大倍率,p 是以μm为单位的像素间距。图6可以执行“正向”计算,即根据您所需的曝光时间找到所需的扫描速度,或执行“反向”计算,根据目标扫描速度和曝光时间返回所需照明器辐射通量设置的值。这两个计算都将返回下一步中触发器配置所需的值 。trigger encoder distTriggerRescalerRate
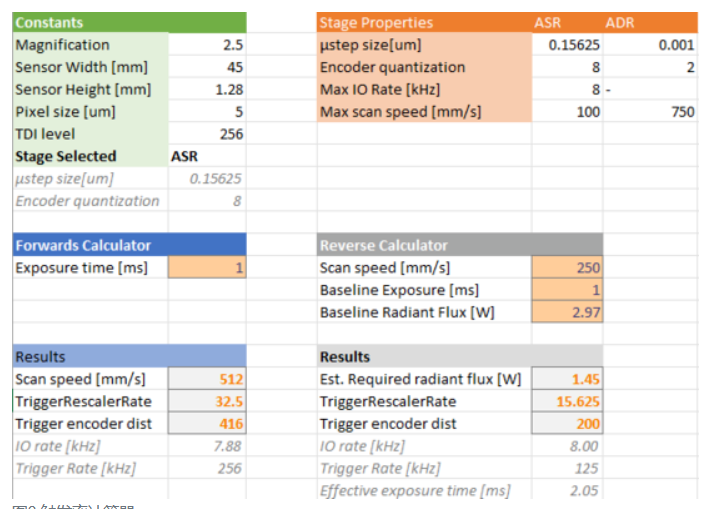
图3:触发率计算器
步骤三:zaber载物台触发配置
在zaber电动载物台上使用命令(FW 7.12 及更高版本),一旦编码器测量到zaber载物台至少移动了x个单元,就会触发 IO。距离以微步为单位,如第二步那样计算。trigger when encoder dist x
需要注意的是由于Zaber载物台以10kHz tick处理触发器,因此计算器将触发率限制为8kHz,以便在不遗漏任何触发器的情况下提供最大量的速度信息。
trigger 1 when 1 encoder dist x
trigger 1 action a io set do 1 t
trigger 1 enable
为了实现最有效的扫描时间,将使用在扫描之间交替方向的“蛇形”模式。有必要更改相机TDI方向以匹配每条扫描线末端的载物台方向。这是通过IO引脚实现的。向前移动时,引脚应设置为低电平,反向移动时应设置为高电平。长扫描通道之间的跨距应提供足够的重叠以帮助图像拼接,但不要太多,以增加许多额外的扫描通道。5%是一个很好的起始值。Camera Direction
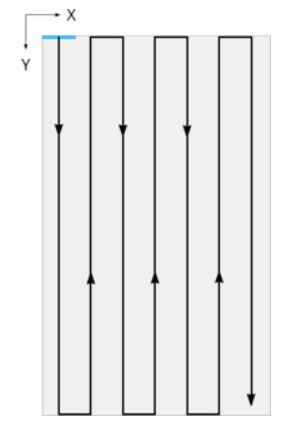
图4:“蛇形”图案,在交替的扫描线上反转方向,单个视场以蓝色表示
以下一组触发器将根据zaber电动载物台速度的符号设置TDI方向。
trigger 2 when 1 vel >= 0
trigger 3 when 2 vel < 0
trigger 2 action a io set do 2 1
trigger 3 action a io set do 2 0
trigger 2 enable
trigger 3 enable
步骤四:相机触发设置
如何使用Zaber载物台和Dhyana 9KTDI相机去实现更高的扫描速度,最大限度地发挥这种成像技术的潜力,有必要将zaber载物台触发频率提高的10kHz 以上。Dyhana 9KTDI相机包含一个触发重定器,可将接收到的触发频率乘以用户设定值。这可以使用Tucsen SamplePro或KAYA Vision Point软件进行配置。本示例中使用的触发设置如下所示:
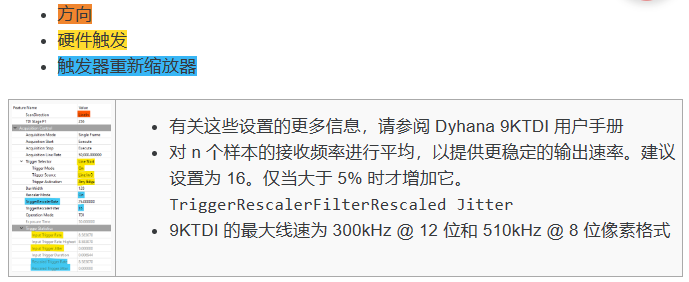
图5:Tucsen SamplePro 软件相机配置窗口
要测试设置,请使用Zaber Launcher中的cycle命令(图6)来回移动载物台。检查是否与步骤2中计算的匹配。当zaber载物台加速和减速时,这些值会波动,因此只有当载物台处于稳定速度时,这些值才会在行驶过程中有效。Input Trigger RateRescaled Trigger Rate
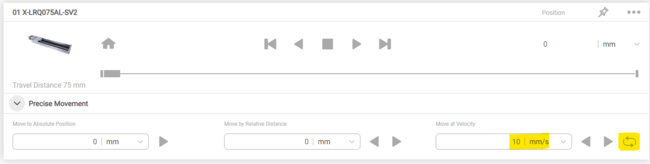
图6:在Zaber Launcher中启用循环移动以检查触发设置是否正确
步骤五:成像设置
在成像之前,相机必须与扫描方向对齐。为此,请在“区域扫描”模式下启动相机并松开Zaber MTC9X F卡口适配器上的锁定环。将物镜聚焦在样品上并旋转相机,使载物台的扫描方向垂直于传感器。根据需要进行调整,然后拧紧锁环以将相机固定在正确的位置。

图7:两张幻灯片的WSI图像,5xN-Achroplan,100mm/s扫描速度。用MLR3B@3000K照明,未应用平场或焦点校正
步骤六:运动控制设置
为了充分利用最新sCMOS TDI相机的出色功能,需要一种能够快速稳定运动和高精度编码器输出的运动控制解决方案。这里使用的Zaber X-ADR130 XY载物台是TDI扫描的理想选择,主要优点是:
-出色的速度稳定性。X-ADR系列的集成控制器与其高推力直线电机和低阻力交叉滚子轴承相结合,相对于丝杠驱动的平台,可实现极其平稳的运动。
-干涉仪校准的直接编码器。每个X-ADR载物台台都经过单独干涉仪校准。这最大限度地减少了可能导致载物台误读其速度的编码器刻度螺距误差,并显着提高了速度分辨率和可重复性
-快速的最大速度和加速度。峰值速度为750mm/s,加速度高达20 m/s2,zaber电动载物台X-ADR系列在明场和透射成像方面表现出色,其中照明通常不是成像速度的限制因素。在全速和加速度下,X-ADR载物台可以在2秒内以2倍放大倍率扫描整个96孔板。
-几乎无限的使用寿命。X-ADR载物台是高通量应用和集成到OEM设备中的理想选择。Zaber的直线电机平台已在24/7 连续运行中测试了1年多,没有明显磨损。
-集成控制器和驱动器。与所有Zaber X系列运动控制设备一样,X-ADR载物台具有集成控制器和驱动器,这意味着可以开箱即用,这大大简化了系统设置。
为了达到最佳性能,成像应在运动的恒速部分进行(图12),以避免加速和减速引起的成像伪影。

图8:成像应在运动曲线的阶段进行,其中载物台以恒定速度移动,以蓝色突出显示
为了获得最佳的扫描时间,X-ADR的上轴应用于长时间的扫描运动。上轴的运动质量较低,这使得它比下轴加速得更快,下轴也必须承载上轴的质量。下轴应在长扫描通道之间执行步进运动(图9、10)。 在扫描速度>100mm/s时,应在样品之外留出超程距离(图9),以便载物台可以安全地加速、减速和完全改变样品区域之外的方向。使用Zaber Launcher,将扫描阶段的加速和减速设置得尽可能高,而不会失速。这最大限度地减少了加速和减速阶段的行驶距离。还建议在Zaber启动器中将X-ADR的扫描轴伺服调谐设置为“刚性”,并将步进轴调谐为“平滑”。这些设置将最大限度地提高速度稳定性,并防止在扫描过程中出现不必要的振荡。
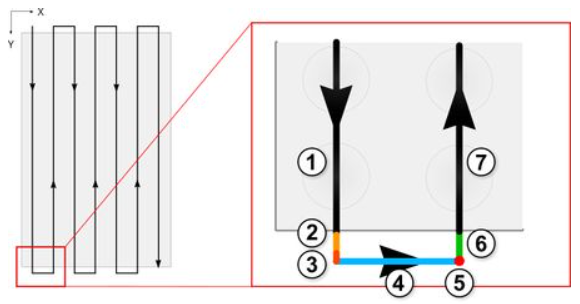
图9:运动控制的阶段。1:稳定的扫描速度,2:减速,3:停止,4:跨步,5:读出方向变化,6:加速度,7:稳定的扫描速度。扫描运行包括超程,以确保扫描完全在运动曲线的恒定速度部分进行
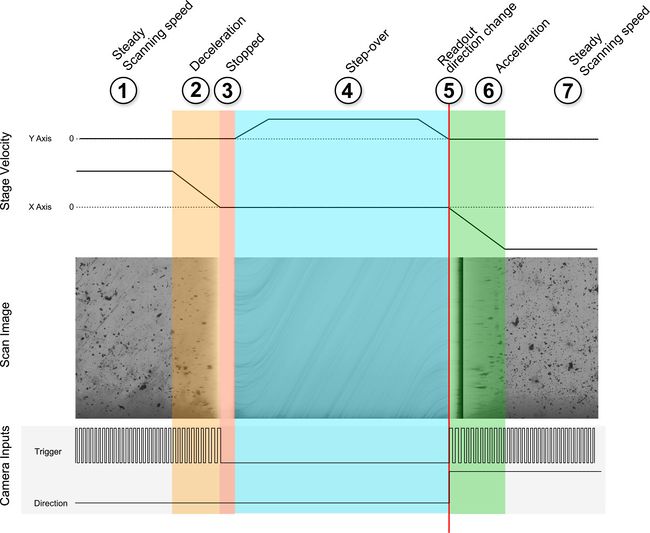
图10:zaber载物台速度、相机输入和扫描过程中生成的扫描图像,以及扫描载物台在扫描和跨步序列中的进展
对于较高放大倍率下的大样品,有必要与XY载物台协调改变焦点,以考虑样品中的平坦度误差。在Zaber MVR显微镜上,这是通过将触发信号传递到X-LDA对焦台来完成的,以依次通过预加载的对焦点列表。
步骤七:自动扫描和成像
为了最大限度地提高成像吞吐量,Zaber的流媒体功能可用于直接在载物台的集成控制器上加载和运行预设的运动序列,这消除了通过从外部计算机系统引导载物台运动而引入的通信延迟。本示例中用于扫96孔板的Python代码可在zaber-examples中找到。该代码根据X轴和Y轴的尺寸和加速度,计算出横向移动样本的最快方式。根据这些值,它将生成一个执行运动序列的数据流。该脚本生成的数据流加载到控制器后,可通过调用存储的数据流用于后续扫描。
使用 Kaya KYFG API 可以配置摄像机和设置图像缓冲区。它适用于 python 和 C#。这里使用的示例提供了使用 Dyhana 9KTDI 摄像机进行摄像机配置和图像采集的基本介绍。
zaber-examples中提供的示例代码执行以下基本操作:
1.列出可用的图像采集卡:KYFG_Scan()
2.打开选定的图像采集卡KYFG_Open(grabberIndex)
3.连接到相机 0
4.使用键值对设置所需的相机设置:KYFG_SetCameraValueEnum_ByValueName(camHandleArray[grabberIndex][0], "PixelFormat", "Mono8")
5.构造一个流缓冲区来包含数据。KYFG_StreamCreate()、分配一个回调函数来监视它、在aligned_array中分配内存以使用KYFG_BufferAnnounce()
6.启动相机,这将开始将数据转储到指定的缓冲区。KYFG_CameraStart()
7.通过 ZML 开始扫描
8.在扫描的每一行末尾:从内存中读取图像缓冲区;将其附加到图像中,同时考虑到由于读出方向的变化,每隔一行就会垂直翻转
连接和配置相机和运动控制硬件并设置软件后,就可以进行扫描了。

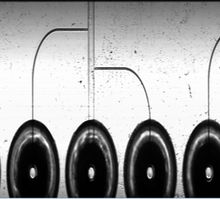
图11:BPAE细胞的BFP扫描。蔡司10x EC Epiplan,50mm/s,模拟增益8x,照明@385nm,带MLR3B

图11:BPAE细胞的BFP扫描。蔡司10x EC Epiplan,50mm/s,模拟增益8x,照明@385nm,带MLR3B
用于大幅面扫描系统的TDI:

图13:用于扫描大样品的 Zaber 龙门架系统示例
除了显微镜应用外,TDI相机还可以与精密运动控制一起使用,使用传统的机器视觉镜头以非常高的分辨率对样品进行成像。Zaber 的龙门系统(图17)是大型表面检测或画廊艺术品数字扫描等应用的理想平台。Dyhana 9kTDI的 45mm线高还可以在一次通过中捕获更小的样品。这在扫描难以进出样品架的物体时特别有用,因为它允许样品架在相机扫过样品时保持静止。根据上述方法改编的示例使用安装在Zaber X-LDM单轴直线电机平台上的9KTDI相机(图18)在单次通过中捕获档案缩微胶片的高分辨率扫描(图19)。

图14:用于缩微胶片扫描的相机安装

图15:使用X-LDM210C和Schneider Optics Macro 80mm F5.6镜头在<450毫秒内完成缩微胶片扫描
结论:
与现有解决方案相比,Zaber载物台和TDI成像可以将成像速度提高一个数量级,实现10倍成像通量。相机图像传感器设计的最新发展产生了一类新型低噪声sCMOS TDI相机,为科学界带来了TDI成像的速度优势。Zaber的直线电机X-ADR显微镜载物台结合了极快且可重复的运动、精确的编码器和速度稳定性,使其成为 TDI 扫描系统的理想选择。安装在Zaber MVR倒置显微镜上的Dyhana 9KTDI相机和Zaber X-ADR扫描台构成了一个能够实现极高通量的模块化成像系统。
zaber Nucleus显微镜设置中的疑难解答:
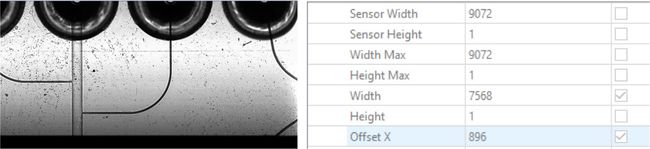
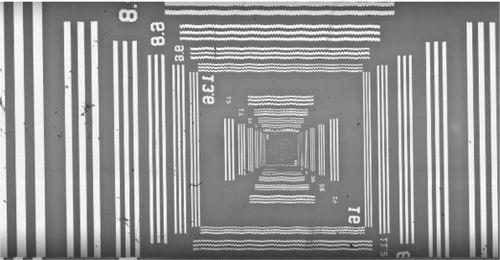
-图像中的黑条表示您捕获的视野比显微镜能够成像的视野更大。调整宽度和偏移量 X 以消除这种情况。
-如果图像沿扫描轴看起来被压扁或拉伸,则表明触发速率不匹配。检查您的触发编码器 dist 和 .还要检查触发速率的设置速度是否不超过所选像素格式的相机运行速度。TriggerRescalerRate
-高灵敏度相机即使在最小增益和最小照明器功率下也可能提供过于明亮的图像。在明场或透射照明下使用低倍率物镜进行成像时,可能会遇到这种情况。可在光路中安装中性密度(ND)滤光片以解决此问题。
-如果图像沿扫描方向模糊,但在横向上清晰,则触发方向设置可能是向后设置的。

-如果看到外观模糊/波浪形的直线,则表示沿阶梯轴的像素级偏移。尝试将伺服调谐更改为“平滑”,这将使控制回路不那么激进。
抖动问题:
抖动是运动曲线和成像触发的变化,由完全恒定的延迟和线间距触发。抖动问题将导致以下伪影:
-触发率不一致时的曝光方差
-在触发器之间移动的距离大于完整像素的情况下的运动模糊
在载物台减速到停止的地方,您会看到随着触发周期的减慢,亮度会增加。输出图像中也会有明显的运动模糊(图10)。抖动总量可以使用相机上的参数进行监控,以 % 为单位。以下是 Zaber 阶段的一些代表性值,这些值产生了高质量的图像。InputTriggerJitter
|
XY载物台 |
速度(mm/s) |
InputTrigger抖动(%) |
|
X-ASR120型 |
50 |
1.5 |
|
X-ADR130型 |
100 |
1.0 |
以下是一些抖动的来源,如果您在设置时遇到问题,需要考虑:
|
定时抖动 |
运动抖动 |
|
编码器量化 |
编码器刻度音距误差 |
|
固件处理差异(~1μs) |
轴承阻力偏差 |
|
电气上升和下降时间的变化 |
PID整定导致的误差后速度波动 |
|
重新定标机斜坡上升/斜坡下降 |
丝杠驱动平台可能存在螺距误差、间隙和丝母粘滑 |


