作者:戴xl 时间:2025-01-09
深入解析电动直线平台精度测量,全面涵盖位置精度(定位精度、重复定位精度、空行程等)、动作精度(运动平行度、XY垂直度、Z轴垂直度)、扭矩刚度、姿态精度(俯仰精度、偏摆精度、平行度)及最小位移量(MIM)。以HPS60-20X为例,其测量数据显示目标位置从0μm到20000μm时,多次测量得出平均位置偏差、标准偏差等,最终结果为最大空行程1.10μm、平均空行程0.62μm、重复定位精度(单位定位精度)正方向0.77μm及负方向0.62μm、定位精度2.97μm,以及HST-50X最小位移量图示。为精密制造等领域提供精准技术参考,助力提升工业生产精度与效率。以下为大家详细介绍西格玛光机/OptoSigma/Sigmakoki电动直线平台的精度测量。
电动直线滑台精度测量/电动直线平移台精度测量/电动直线位移台精度测量/电动直线平台精度测量-位置精度
从某一基准点开始,在全行程范围内,按一定间隔,单方向依次定位。求出不同定位点的实际测量值和目标值的差,定义其最大值和最小值的差为定位精度,如图1(a);在平台的任意位置(两端或中心等),从正方向及负方向进行多次定位,求出各点停止位置的偏差值的平均值。定义其中的最大值为空行程,如图1(b)。
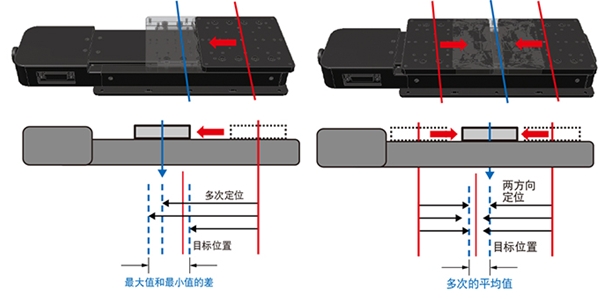
图1:电动直线滑台精度测量/电动直线平移台精度测量/电动直线位移台精度测量/电动直线平台精度测量(a)定位精度(b)空行程
在平台的任意位置(两端或中心等),从相同方向进行多次定位,求出停止位置的偏差值的最大值。定义其数值中的最大值为重复定位精度,如图2(a);在平台的任意位置(两边·中心等),向正方向或负方向加载一定推力,西格玛光机/OptoSigma/Sigmakoki定义其2个方向的偏移量的总和为传动副间隙,如图2(b)。
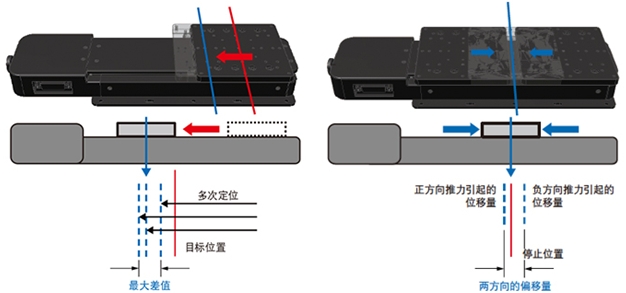
图2:电动直线滑台精度测量/电动直线平移台精度测量/电动直线位移台精度测量/电动直线平台精度测量(a)重复定位精度(b)传动副间隙
电动直线滑台精度测量/电动直线平移台精度测量/电动直线位移台精度测量/电动直线平台精度测量-动作精度
西格玛光机/OptoSigma/Sigmakoki定义平台在全行程范围运动时,台面在高度方向的偏移量为运动平行度。以XY轴平台的X轴为基准,这时用直角尺测量Y轴方向在动作中的位移量。这个偏移量杯定义为XY垂直度。在Z轴平台上设置千分表,并测量与某一基准垂直台间的相对偏移量。西格玛光机/OptoSigma/Sigmakoki定义这个偏移量为Z轴垂直度。
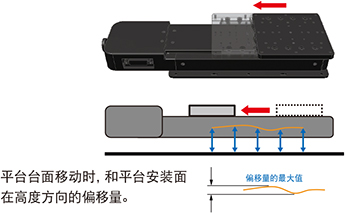
图3:电动直线滑台精度测量/电动直线平移台精度测量/电动直线位移台精度测量/电动直线平台精度测量自动平行度
电动直线滑台精度测量/电动直线平移台精度测量-测量结果(参考值,HPS60-20X)
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||||||||||
|
目标位置(μm) |
0 |
2500 |
5000 |
7500 |
10000 |
12500 |
15000 |
17500 |
20000 |
||||||||||
|
定位方向 |
↑ |
↓ |
↑ |
↓ |
↑ |
↓ |
↑ |
↓ |
↑ |
↓ |
↑ |
↓ |
↑ |
↓ |
↑ |
↓ |
↑ |
↓ |
|
|
位置偏差(μm) 测量值·目标位置 |
第一次测量 |
0.0 |
-1.2 |
-0.1 |
-0.5 |
0.2 |
-0.8 |
-0.3 |
-0.5 |
-0.1 |
-1.4 |
-0.4 |
-1.1 |
-1.7 |
-2.3 |
0.3 |
0.1 |
-1.5 |
-1.8 |
|
第二次测量 |
-0.6 |
-1.2 |
-0.2 |
-0.4 |
0.1 |
-0.7 |
-0.2 |
-0.6 |
-0.3 |
-1.4 |
-0.8 |
-0.9 |
-1.7 |
-2.5 |
0.0 |
-0.1 |
-1.5 |
-1.9 |
|
|
第三次测量 |
-0.4 |
-0.9 |
-0.1 |
-0.8 |
0.2 |
-1.3 |
-0.4 |
-0.7 |
-0.1 |
-1.3 |
-0.8 |
-1.2 |
-1.5 |
-2.6 |
0.3 |
0.0 |
-1.5 |
-1.9 |
|
|
第四次测量 |
-0.2 |
-1.6 |
-0.3 |
-0.6 |
-0.2 |
-0.9 |
-0.4 |
-0.6 |
-0.3 |
-1.2 |
-0.8 |
-1.2 |
-1.5 |
-2.5 |
0.3 |
-0.2 |
-1.5 |
-2.0 |
|
|
第五次测量 |
-1.0 |
-1.2 |
-0.3 |
-0.6 |
0.0 |
-1.4 |
-0.5 |
-0.6 |
-0.2 |
-1.2 |
-0.6 |
-1.1 |
-1.6 |
-2.6 |
0.2 |
-0.1 |
-1.7 |
-2.0 |
|
|
平均位置偏差X |
-0.44 |
-1.22 |
-0.20 |
-0.58 |
0.06 |
-1.02 |
-0.36 |
-0.60 |
-0.20 |
-1.30 |
-0.68 |
-1.10 |
-1.60 |
-2.50 |
0.22 |
-0.06 |
-1.54 |
-1.92 |
|
|
标准偏差X |
0.38 |
0.25 |
0.10 |
0.15 |
0.17 |
0.31 |
0.11 |
0.07 |
0.10 |
0.10 |
0.18 |
0.12 |
0.10 |
0.12 |
0.13 |
0.11 |
0.09 |
0.08 |
|
|
X+S |
-0.06 |
-0.97 |
-0.43 |
-0.43 |
0.23 |
-0.71 |
-0.25 |
-0.53 |
-0.10 |
-1.20 |
-0.50 |
-0.98 |
-1.50 |
-2.38 |
0.35 |
0.05 |
-1.45 |
-1.84 |
|
|
X-S |
-0.82 |
-0.47 |
-0.73 |
-0.73 |
-0.11 |
-1.33 |
-0.47 |
-0.67 |
-0.30 |
-1.40 |
-0.88 |
-1.22 |
-1.70 |
-2.62 |
0.09 |
-0.17 |
-1.63 |
-2.00 |
|
|
空行程B=X↑-X↓ |
0.78 |
0.38 |
1.08 |
0.24 |
1.10 |
0.42 |
0.90 |
0.28 |
0.38 |
||||||||||
|
最大(位置偏差)值S↑+S↓+|B| |
1.41 |
0.63 |
1.56 |
0.42 |
1.30 |
0.72 |
1.12 |
0.52 |
0.55 |
||||||||||
|
每转的偏差 |
1.00 |
0.80 |
0.80 |
0.90 |
0.70 |
1.60 |
2.60 |
1.90 |
|
||||||||||
结果:
|
最大空行程 |
平均空行程 |
重复定位精度(单位定位精度) |
定位精度 |
|
|
↑ |
↓ |
|||
|
1.10μm |
0.62μm |
0.77μm |
0.62μm |
2.97μm |
电动直线位移台精度测量/电动直线平台精度测量扭矩刚度(俯仰·偏摆·转动)
扭矩刚度表征在偏离台面中心的位置上施加某一载荷时的平台倾斜程度。(台面中心和工件重心不一致。)
西格玛光机/OptoSigma/Sigmakoki定义在距离台面中心1cm的位置上加载1N的负载时而引起的台面的倾斜角度(单位:秒)为扭矩刚度。
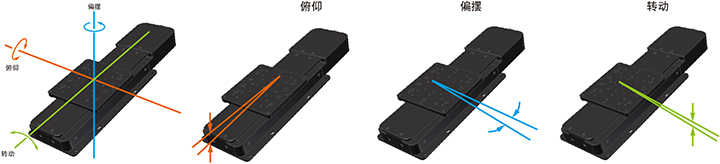
图4:电动直线滑台精度测量/电动直线平移台精度测量/电动直线位移台精度测量/电动直线平台精度测量扭矩刚度(俯仰·偏摆·转动)扭矩刚度
电动直线滑台精度测量/电动直线平移台精度测量/电动直线位移台精度测量/电动直线平台精度测量-姿态精度
俯仰:平台在移动过程中,在俯仰方向的台面的角度变化量。西格玛光机/OptoSigma/Sigmakoki定义其在全行程动作过程中的最大角度变化量为俯仰精度。
偏摆:平台在移动过程中,在偏摆方向的台面的角度变化量。西格玛光机/OptoSigma/Sigmakoki定义其在全行程动作过程中的最大角度变化量为偏摆精度。
平行度:西格玛光机/OptoSigma/Sigmakoki定义在固定不动时的平台台面与固定用基准面的平行程度为平行度。
(参考)XY轴平台的精度测量
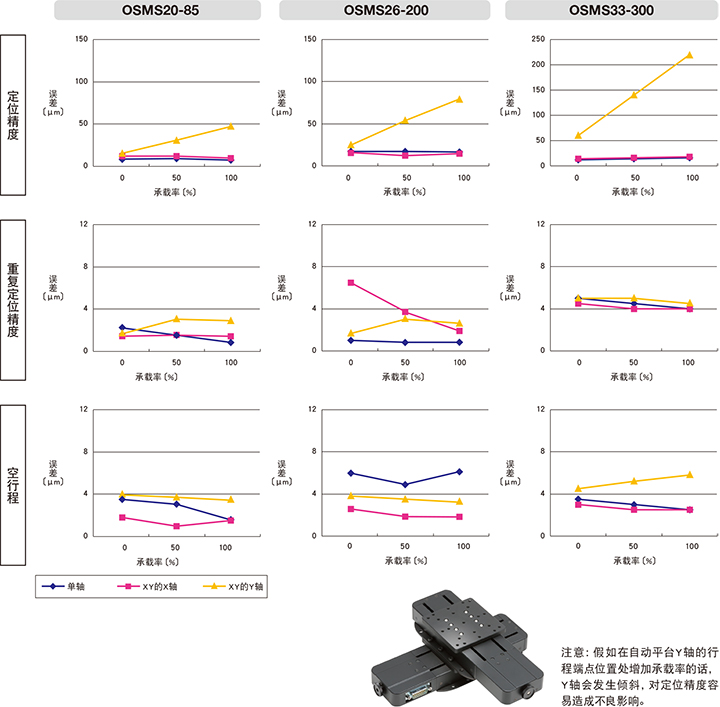
图5:XY轴平台精度测量-电动直线滑台精度测量/电动直线平移台精度测量/电动直线位移台精度测量/电动直线平台精度测量
注意:假如在自动平台Y轴的行程端点位置处增加承载率的话,Y轴会发生倾斜,对定位精度容易造成不良影响。
电动直线滑台精度测量/电动直线平移台精度测量-最小位移量(MIM)
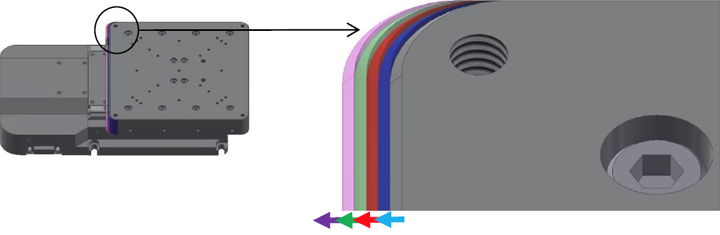
图6:电动直线滑台精度测量/电动直线平移台精度测量-最小位移量(MIM)
西格玛光机/OptoSigma/Sigmakoki定义在平台的3个特定位置(两端和正中间)进行定位时,可实现的最小移动分辨率为最小位移量。
验证方法:分别在各个位置上,指令平台沿正方向和负方向分别移动10个点并测量相应的移动量。
测量时,分别使用了精密小位移传感器和自动准直仪。
(参考数据)最小位移量(MIM)HST-50X
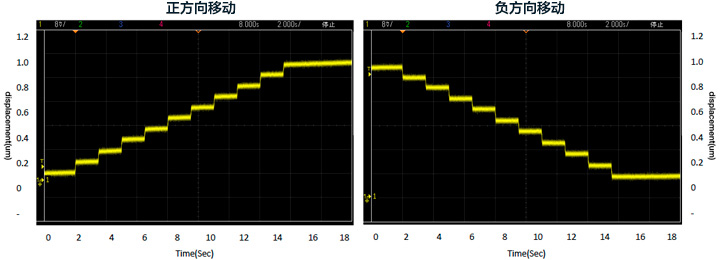
图7:(参考数据)最小位移量(MIM)HST-50X


