作者: 时间:2021-11-17
DataRay的Beam'R2和BeamMap2都是具有相同工作原理的扫描狭缝测绘设备,兼备了扫描式狭缝和刀口式狭缝工作模式,可测量光束质量M2等实时光束分析。旋转圆盘上的狭缝方向是相互正交的,光电探测器位于圆盘后面。当狭缝扫过光束时,通过旋转圆盘的后光束到达探测器的功率将变化数据,这些数据被用仪器创建X和Y曲线,并计算出各种光束参数。图1展示了当狭缝从左到右扫过光束时,光束轮廓是如何构建的。
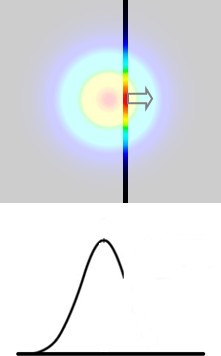
图1 狭缝横穿光束时的剖面结构
Beam'R2使用两对x-y狭缝,两对狭缝分别是宽度为2.5μm和25μm (InGaAs为5和50µm),而DataRay的BeamMap2代表了一种完全不同的实时光束分析方法,它通过允许沿光束行程的多个位置进行测量,扩展了Beam'R2的测量光束质量M2等功能,这种实时狭缝扫描系统在旋转圆盘上不同的Z轴位置安装4对狭缝,从而在光束质量M2调试中实现实时、多平面测量。图2 在Beam'R2操作手册和Beammap2操作手册说明了这两个圆盘之间的区别:
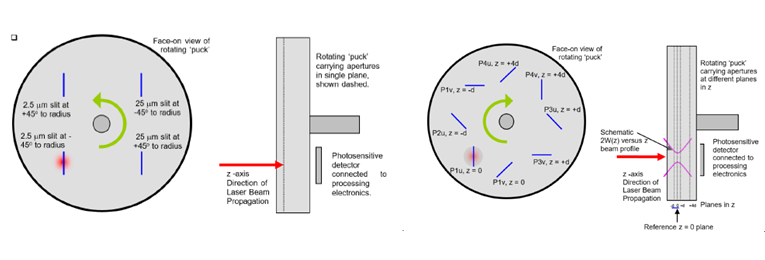
图2 Beam'R2狭缝扫描示意图(左)和BeamMap2狭缝扫描示意图(右)
扫描式狭缝模式适合光束直径至少四倍于狭缝的情况,所测光束和狭缝重叠时,只有狭缝宽度的部分光束能透过,光电探测器随着狭缝扫过整个光束进行光强采样。刀口式狭缝适用于光束直径小于狭缝宽度的光束。在刀口模式下,扫描狭缝透过的光束从0到100%变化,然后在整个光束进入刀口时达到一个峰值,随着狭缝继续扫描光束,会逐渐减小直到再次变为零。光束的直径便可以通过分析光电探测器响应的上升来确定。另外,扫描狭缝装置中的扫描式狭缝和刀口式狭缝还具有很大的波长范围,而相机式模式中的硅探测器难以对1200纳米以上的波长进行成像,另外,扫描狭缝装置可以同时使用硅和InGaAs光电探测器,大大扩展了设备的波长范围。
BeamMap2代表了一种完全不同的实时X、Y、Z、Θ、Φ光束剖析方法,获得专利的多平面实时狭缝扫描系统与True2DTM蓝宝石狭缝技术上的多层金属薄膜相结合。BeamMap2可测的物理量和特点有:实时测量光束质量M2;实时诊断聚焦和对准误差;测量非常小的激光束轮廓;测量光束的准直/发散/指向性。
下面主要对Beam'R2操作手册和Beammap2操作手册进行展述,通过DataRay操作手册对光束质量M2调试过程和操作方法上进行简要的介绍。
安装BeamMap2/Beam'R2时,USB2.0电缆连接到计算机的USB2.0兼容端口上。启动对应的驱动软件后,设备LED将依次显示“Off, Red, Green”,设置后便可以开始测量。
Beam'R2操作手册:
1.遵循软件和硬件的安装说明;
2.确保光束低于设备规格的最大辐照度限制;
3.确保至少有可用于光束定位的至少X和Y对准调整;
4.启动相机的绿色按钮,显示“Beam'R2.[FW version] Ready”后启动探测器;
5.打开激光光源,光束大致对准设备的输入孔中心;
6.如果光束对准得很好,在对准面板中标志着光束中心点的圆形形状;
7.继续通过观察中心点标记的移动情况,继续小范围调整光束的对齐;
8.在软件面板上读取光束直径和其他测量参数。
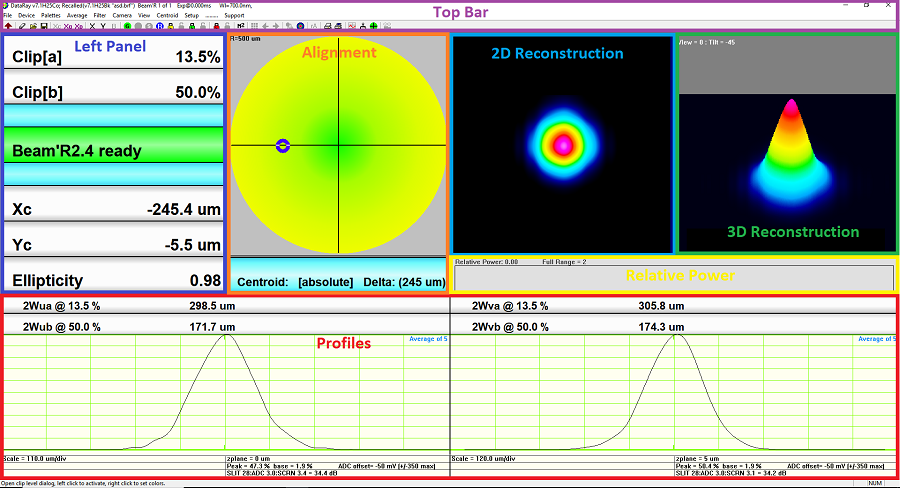
图3 Beam'R2软件面板
BeamMap2操作手册:
1.遵循软件和硬件的安装说明;
2.确保光束低于设备规格的最大辐照度限制,要测量光束质量M2,它必须是一束聚焦的光;
3.确保有X,Y,Z,Θ,和Φ的对齐调整;
4.点击显示“BeamMap2[FW version] Ready”按钮,准备启动探测器;
5.打开激光光源,光束大致对准设备的输入孔的中心;
6.光束中心点、指向(孔径)和焦点位置必须对准;
7.通过观察中心点标记的情况,继续小范围调整光束的对齐;
8. 在软件面板上读取光束直径和其他测量参数。
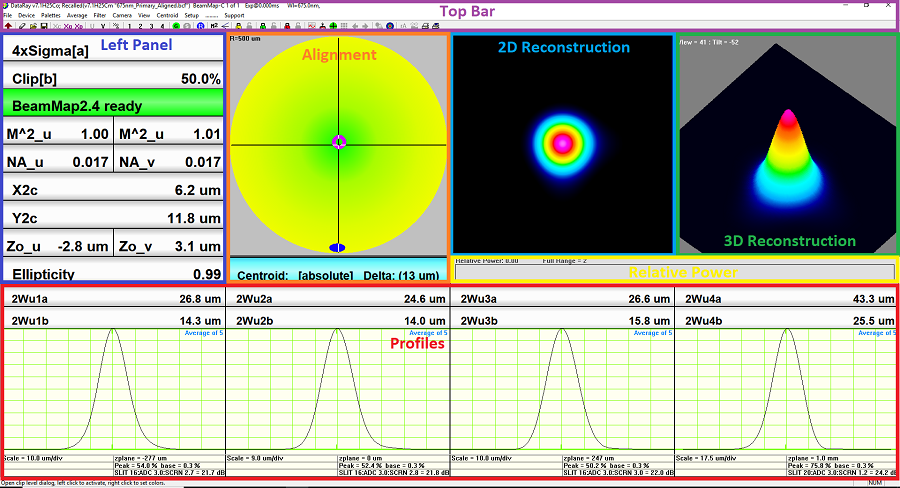
图4 BeamMap2软件面板
在软件面板的工具栏上,鼠标悬停在任何按钮上可以显示其功能并进行选择。
对于BeamR'2,

 :剖面图控制——“X、Y、Z”按钮分别显示X轮廓、Y轮廓、X和Y轮廓。
:剖面图控制——“X、Y、Z”按钮分别显示X轮廓、Y轮廓、X和Y轮廓。
对于BeamMap2,

 :剖面图控制——“U/V、Xc@、1-4”按钮分别是轮廓显示、中心点、狭缝对的选择;
:剖面图控制——“U/V、Xc@、1-4”按钮分别是轮廓显示、中心点、狭缝对的选择;
 :M2按钮——对数据进行最小二乘法双曲拟合,计算M2和相关值;
:M2按钮——对数据进行最小二乘法双曲拟合,计算M2和相关值;
 :发散按钮——对数据进行最小二乘法线性拟合,计算发散和相关值;
:发散按钮——对数据进行最小二乘法线性拟合,计算发散和相关值;
关于BeamR'2和BeamMap2工具栏上,两者相同的按钮的主要功能介绍如下:

另外,在BeamMap2的M2对话框上(如图5),在光束质量M2调试中的“Clip[a]”光束直径定义必须设置为“Sigma x4”;平均值应至少设为5;波长必在设置菜单中输入后不能在测量后保存的文件中改变,束腰要接近"zero"平面,“Zo/Zr”<0.20。
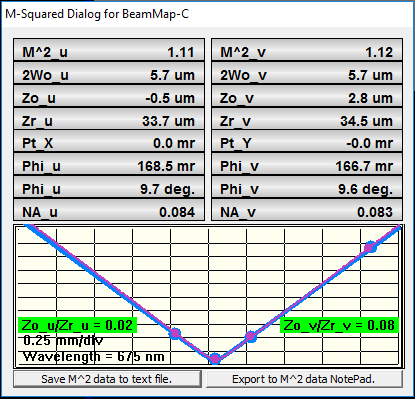
图5 BeamMap2的M2设置对话框
•M:对于TEM00高斯光束来说等于1.0,对于一般光束来说>1.0。
•2Wo:束腰的直径
•Zo:相对于仪器零平面的光束腰位置,负值意味着光束腰更接近仪器的前端。
•Zr:光束的瑞利长度范围
•Pt:光束指向角,单位为mrad,也称为瞄准或内视
•Phi: 光束的远场发散角,Φ
•NA:光束的远场数值孔径。NA = sin(φ /2) = 1/2(F/#)
另外,BeamMap2在调焦中,注意以下问题:
•束腰离零平面太远而导致“Zo/Zr”框不是绿色的;
•光束在x,y中不居中,并从探测器边缘"falls off";
•“Clip[a]”没有设置为“4xSigma”;
•光束有噪音,“4xSigma”值的计算被噪音破坏。尝试13.5%的光束直径进行;
•束腰直径对于单位平面间距来说过大(或过小),比如Zr>平面间距/12(或<平面间距/1.5);
•光束在是否下工作
DataRay操作手册中,关于Beam'R2和BeamMap2在设备校准上配有校准证书,并提供年度重新校准。通过定期的测试,来判断设备是否因出现光束位置漂移;校准圆盘上的实际狭缝位置和角度对于校准效果是比较重要的。校准并不假定光束总是处于其标称半径上。当光束远离校准的“0,0”位置时,测量实际的中心点位置“Xc,Yc”可以确定光束中心点与旋转轴的实际径向距离“r”,从而可以校准测量的光束直径。


